It seems a battery combiner are somewhat common when more then one battery is in a boat. I thought "Hey, why not add some code to let the Arduino Alternator Regulator controlling an external relay and act as a battery combiner". But I had never really sat down and thought things through - till now.
While reading material found on the web - both from
commercial suppliers (aka, people who make combiners), and forums I
found a mixed bag. Talk about sharing current, self adjusting due to
internal impedance and its change vs. SOC (State of Charge), Gassing,
etc. The EE in my followed much of the reasoning (where
it was provided), but also started to call B.S. on other parts of it. After all, who knew:
- ". None of the batteries will ever be 'overcharged' as a result because the charging voltage is controlled."
- "..the reason for the extra wire length [between a combiner and the batteries] is to act like an electic <sic> spring which allows the [product name] to produce a higher current"
Both of these statements are flat wrong. Holding a battery at its gassing voltage well pasts the point where its acceptance current indicates a fully charged battery will do nothing but create heat and risk boiling off the battery. And I for one never know the resistance of a wire could act like an 'electic' <sic> spring! (But then, 6' of 6g wire does have a little over 2.5uH of inductance - in free air. And there is always some level of AC superimposed on top of the DC voltage. So, there is likely some inductive reaction that can be seen.)
Now combiners are not necessarily bad, but one needs to really think things through before blindly putting one in. Read the manual, be very careful about max wire size as well as min lengths, and consider combiners which provide a high-voltage cut-off, preventing overcharging (or sorry, preventing excessive heat and boiling of electrolytic from the battery). Properly installed a combiner can serve a valuable function and not cause damage.
Here is my take on things to consider with combiners. First off, I think there are two broad deployments cases.
Case 1: Two independent batteries, each with their own charging source.
Case 2: Two independent batteries, only one of which has a charging source.
The 1st case is what I have on Viking Star, a starter battery connected to the factory (unmodified) engine alternator, and the house battery with its own large alternator. Here the starter batter is recharged very quickly after engine starting and it would be nice to shunt some of the unused factory alternators capacity over to the house battery to help during the Bulk phase of its charging. Case 2 is perhaps an example were a bow-thruster battery has been installed that needs to be recharged, or a small installation where there is only one alternator, connected to the house battery, and we need to use the same alternator to recharge both batteries. Without risking boiling off the starter/thruster battery. Here is what I have added to the Arduino Alternator Regulator source to address each of these conditions.
Case #1:
Using 2nd battery/alternator to ‘help’ the house battery
during Bulk.
In this example
there are two fully independent battery and associated charging systems. And example might be the factory alternator
+ starter battery, and a house battery with its own alternator using the
Arduino Alternator Regulator. The
starter battery will likely be quickly recharged after the engine starts,
leaving a significant amount of unused capacity in the starter battery’s
alternator.
 |
| Receiving Help combiner profile
(default) |
The figure above illustrates when we
want to combine the two systems (between points ‘X’ and ‘Y’). Specifically during Bulk we want to:
- Wait until the house battery reaches 13.2v before enabling the combiner. If we combined sooner there is a risk of pulling energy from the 2nd battery, as opposed to only asking the 2nd alternator to share its capacity. 13.2v will also reduce the voltage difference between the two batteries thereby minimizing initial surge current.
- Break the connection of the two batteries after 14.2v. With the assumption the 2nd battery has its own charging source that will handle all the recharging needs of that battery, we do not want to ‘override’ those decision. 14.2v was selected under the assumption that many ‘starter’ batteries are connected to a default internally regulator fixed voltage alternator; those are often in the 13.8 to 14.2v range.
Case #2: Recharging a 2nd battery which has no charging
source of its own.
In this
example there are still two independent battery, but only one charging
source. A representative example would
be a house battery / alternator being controlled by the Arduino Alternator
Regulator, and a 2nd battery used
perhaps to power a bow-thruster, or even a starter where there is no 2nd
alternator. Unlike the situation above were
we are looking to gain assistance from the other battery/alternator, in this
case we are asked to be the charging source for the 2nd
battery.
 |
| Charging 2nd battery combiner
profile |
Here the 2nd battery parallels the charge profile of the main
battery, and because we are not actively managing the 2nd battery we
cut off the Acceptance phase after a relatively short time ( Points ‘C’ to ‘Y’
above) to reduce the risk of overcharging
the 2nd battery, in effect boiling it off.
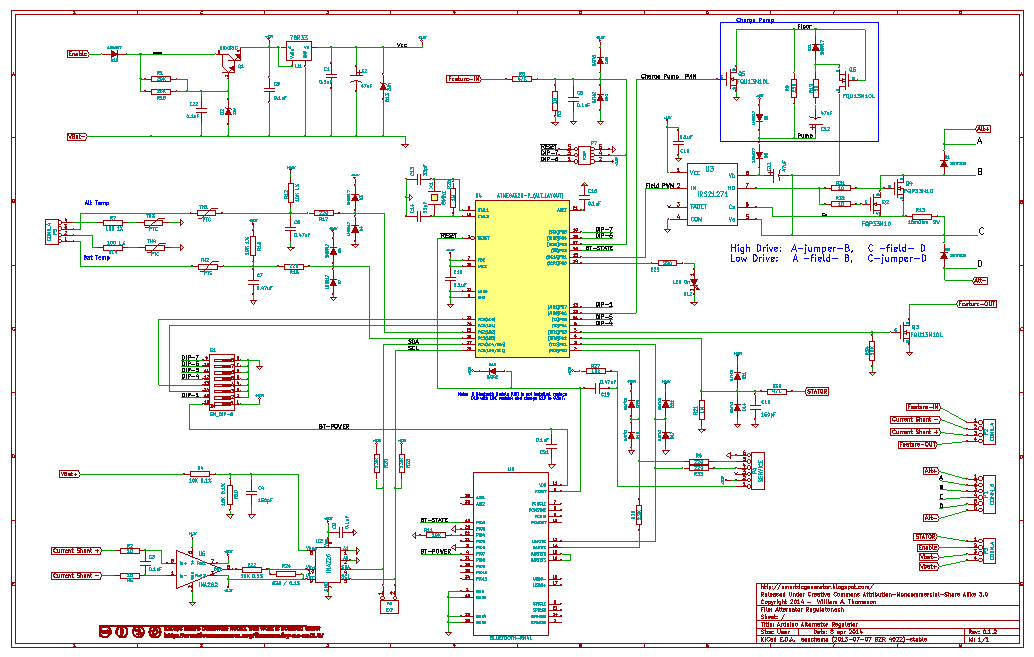
All these parameters are adjustable in the source code, voltages, times, etc. Select the Feature-out combiner option, add a large capacity relay (being careful not to overload the feature-out current limit of 500mA). Make sure there is sufficient smaller-gauge wire (ala, 10' of 10g wire) to manage peak currents and you can have a reasonable 'combiner' But in each case remember:
Care must be taken in each of these situations to protect the 2nd
battery and charging system; remember the Arduino Alternator Regulator will
focus on its battery and adjust things to its needs with NO regard to the other
batteries needs
These capabilities will be in the next posting of the source, v0.1.3 and above.